Als Teil der internationalen Unternehmensplattform SCIO Automation entwickeln wir innovative Produktlösungen, zugeschnitten auf Ihre Bedürfnisse und automatisieren Ihre Produktions- und Logistikprozesse, hin zur Smart Factory.
Innovation treibt uns an. Wir entwickeln intelligente Automatisierungslösungen, die auf kundenspezifische Bedürfnisse zugeschnitten sind. Ein Höchstmaß an Individualität und Effizienz ist garantiert.
Zuverlässiger Partner
Hand in Hand setzen wir mit Ihnen Ihre branchenübergreifenden Automatisierungsprozesse wirtschaftlich sinnvoll um. So möchten wir Ihr Vertrauen gewinnen und folglich eine nachhaltige Partnerschaft.
Hersteller und Integrator
Als Hersteller und Integrator automatisieren wir Ihre Produktions- und Logistikprozesse und sind in jeder Projektphase an ihrer Seite. Planung, Produktion, Realisierung, Inbetriebnahme und Service aus einer Hand.
Innovator
Innovation treibt uns an. Wir entwickeln intelligente Produktlösungen, die auf spezifische Intralogistik-Bedürfnisse unserer Kunden zugeschnitten sind. Ein Höchstmaß an Individualität und Effizienz ist garantiert.
Zuverlässiger Partner
Hand in Hand setzen wir mit Ihnen Ihre branchenübergreifenden Automatisierungsprozesse wirtschaftlich sinnvoll um. So möchten wir Ihr Vertrauen gewinnen und folglich eine nachhaltige Partnerschaft aufbauen.
Hersteller und Integrator
Als Hersteller und Systemintegrator automatisieren wir Ihre Produktions- und Logistikprozesse und sind in jeder Projektphase an Ihrer Seite. Planung, Produktion, Realisierung, Inbetriebnahme und Service aus einer Hand.
Full-Service-Anbieter in jeder Projektphase
Für eine reibungslose Realisierung stehen wir Ihnen, als Ihr Ansprechpartner für die gesamte Wertschöpfungskette zur Verfügung: von der Konzeption über Engineering, Fertigung, Inbetriebnahme bis zum After-Sales-Service.
Branchenlösungen
Überzeugen Sie sich von der Funktionsvielfalt unserer Lösungen. Wir nehmen Ihre Perspektive ein und schaffen so maßgeschneiderte und effiziente Lösungen für Ihre Anforderungen im Food und Non-Food Bereich.
MFI Innovations steht für Zuverlässigkeit und starke Partnerschaft. Wir entwickeln innovative Produktlösungen, zugeschnitten auf Ihre Automatisierungsbedürfnisse und Herausforderungen.
Als Hersteller und Systemintegrator automatisieren wir Ihre Produktions-und Logistikprozesse. Profitieren Sie von Planung, Produktion, Realisierung, Inbetriebnahme und Service aus einer Hand.
Werden auch Sie unser Kunde!
Produkte
Dank unserer jahrelangen Erfahrung können wir mithilfe des gesamten Knowhows sowie breiten MFI Produktportfolios Ihre Projekte optimal umsetzen. Innovation treibt uns an!
Patentierte Innovation für den automatisierten und schonenden Verpackungsprozess von Brot. Qualitätskontrolle inklusiv!
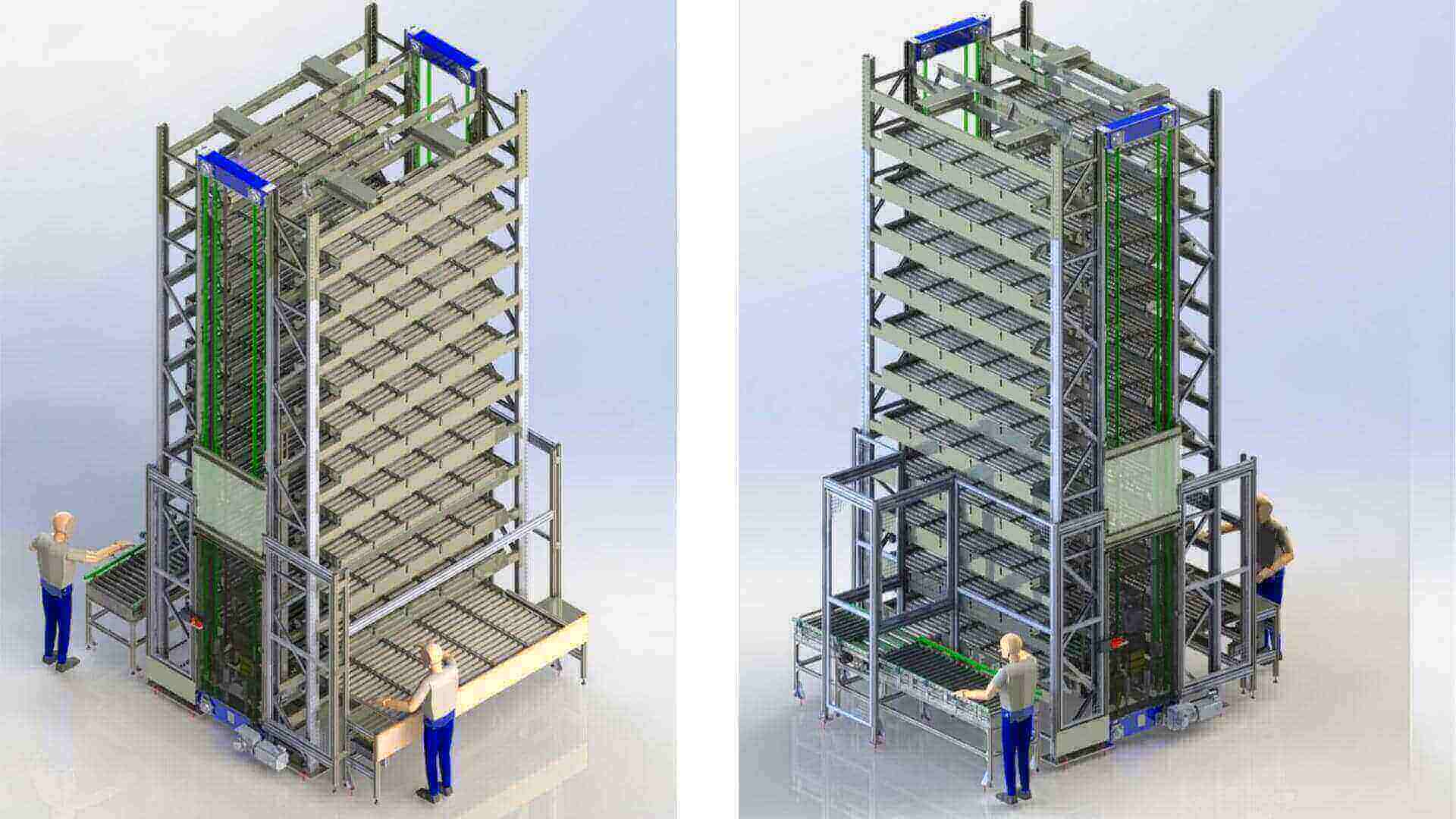
FKS Kommissionierspeicher
Mit FKS Kommissionierspeicher können Sie unterschiedliches Lagergut kommissionieren und platzsparend lagern.
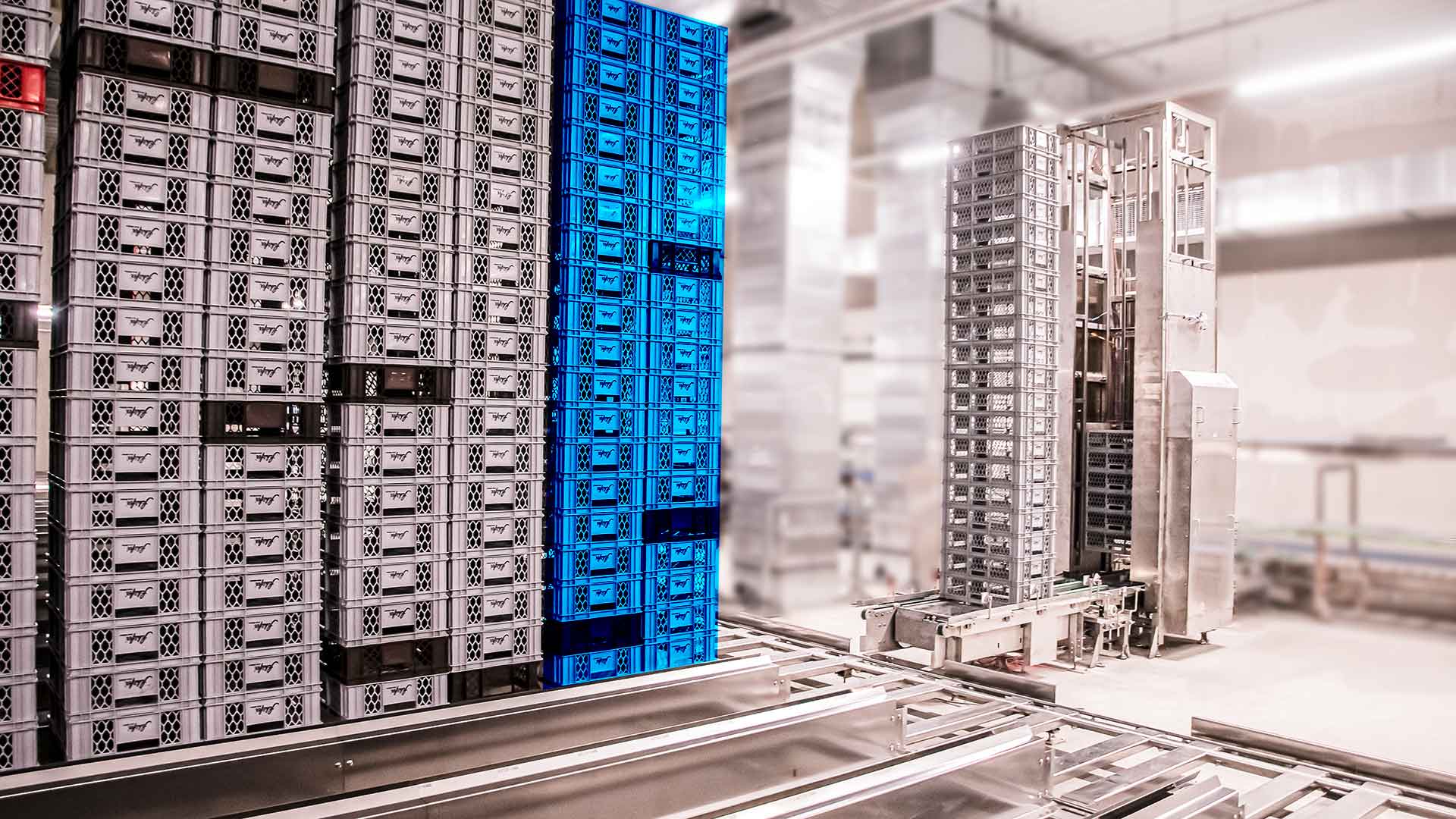
TARO Horizontalspeicher
Ein intelligenter und flexibler Puffer mit variablen Shuttlesystemen für Korblogistik. Komplett in Edelstahl ausgeführt.
EDY Software
Innovative Lagermanagement-Software mit integriertem Lagerverwaltungs- und Materialflusssystem. Erfüllt alle spezifischen Branchenanforderungen und kann an jedes beliebige ERP-System integriert werden.
Lösungen für unsere Kunden
Wir arbeiten zusammen und finden eine Lösung zugeschnitten auf genau Ihren Bedarf. Erfahren Sie jetzt mehr in unserem Case von der Conditorei Coppenrath & Wiese.
"Bei unserem Neubau war es uns wichtig, einen Partner zu haben, bei dem alle Gewerke aus dem eigenen Haus kommen! Ein Ansprechpartner erspart mir eine Menge Zeit und Ärger! Die Entscheidung fiel auf MFI, weil deren Kernkompetenz Maschinenbau und Software ist."